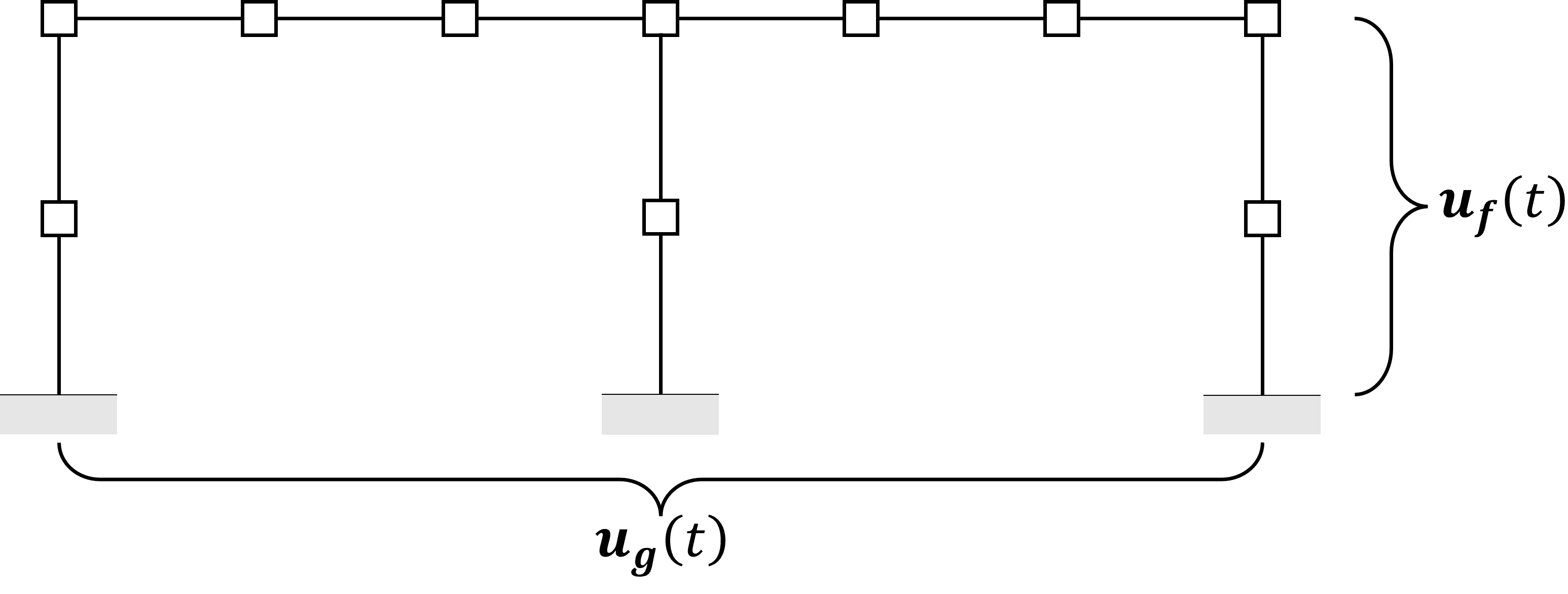
When an multiple degree-of-freedom (MDOF) system is subject to multiple
support excitation, such as in the figure above, the displacement vector
is extended to include the support DOF. An equation of
motion is derived as follows.
Begin by forming a partitioned equation of dynamic equilibrium for all
the DOF:
where the subscript \(g\) indicates support DOF, the subscript
\(f\) indicates structural DOF, and the superscript \(t\)
indicates the total of quasi-static (\(\mathbf{u}^{s}_{f}\), due to
static application of support displacements) and dynamic
(\(\mathbf{u}_{f}\), evaluated by dynamic analysis) structural
displacements.
Taking the first half of the partitioned equilibrium, separating the
structural displacements
(\(\mathbf{u}^{t}_{f}=\mathbf{u}^{s}_{f}+\mathbf{u}_{f}\)), and
moving all \(\mathbf{u}_{g}\) and \(\mathbf{u}^{s}_{f}\) terms
to the right side,
The term
\((\mathbf{k}\mathbf{u}^{s}_{f}+\mathbf{k}_{g}\mathbf{u}_{g})=\mathbf{0}\)
due to static equilibrium, allowing the term to be dropped and giving
\(\mathbf{u}^{s}_{f} = \mathbf{-k}^{-1}\mathbf{k}_{g}\mathbf{u}_{g} = \mathbf{\iota u}_{g}\);
the term
\((\mathbf{c}\mathbf{\dot{u}}^{s}_{f}+\mathbf{c}_{g}\mathbf{\dot{u}}_{g})\)
is dropped because it is usually small relative to the inertia term; and
the term \(\mathbf{m}_{g}\mathbf{\ddot{u}}_{g}\) is dropped because
mass is usually neglected at supports.
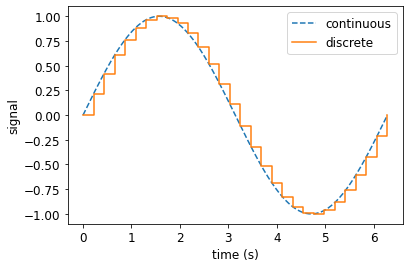
In order to move from the continuous to the discrete case, the
coefficients \(\mathbf{A}_{c}\) and \(\mathbf{B}_{c}\) are
transformed by solving the first-order differential equation with the
signal’s value held constant between time steps (“zero-order hold
method”). The coefficients \(\mathbf{C}\) and \(\mathbf{D}\) are
unchanged. The results are shown in the following equation.